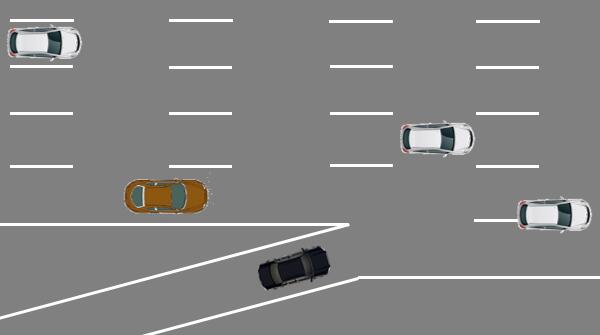
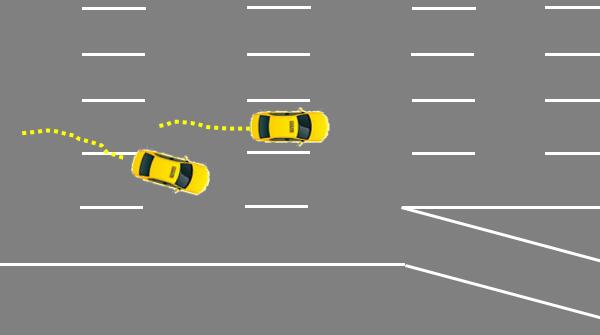
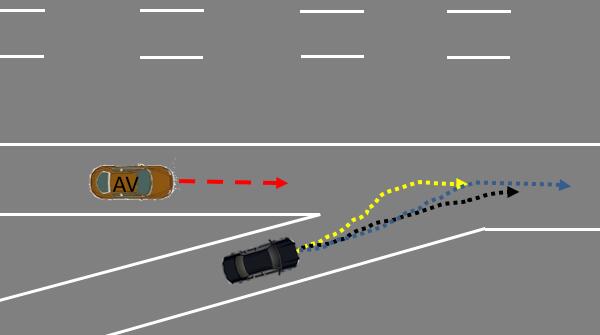
在自动驾驶汽车测试过程中很大的瓶颈就是难以覆盖真实道路状况的所有场景,从而导致测试样例不充分;同时学术界与工业界一致认为,在自动驾驶汽车与人类驾驶汽车共存的混合交通(co-exist traffic)里,尤其是在匝道合流、十字路口等场所多个交通参与者之间互相交互的影响更加明显, 自动驾驶汽车需要对周边交通参与者的行为进行理解和预测(如意图、动作和轨迹)从而做出正确决策,这是目前最具挑战性的问题之一,而要解决这个问题有三个条件不可缺少:
第一:需要大量车辆、行人交互的真实场景数据的搜集和积累作为数据基础。
第二:通过这些数据进行多种预测算法(基于学习或基于规划)的开发。
第三:自动驾驶预测及决策算法在交互式场景中得到充分测试验证。
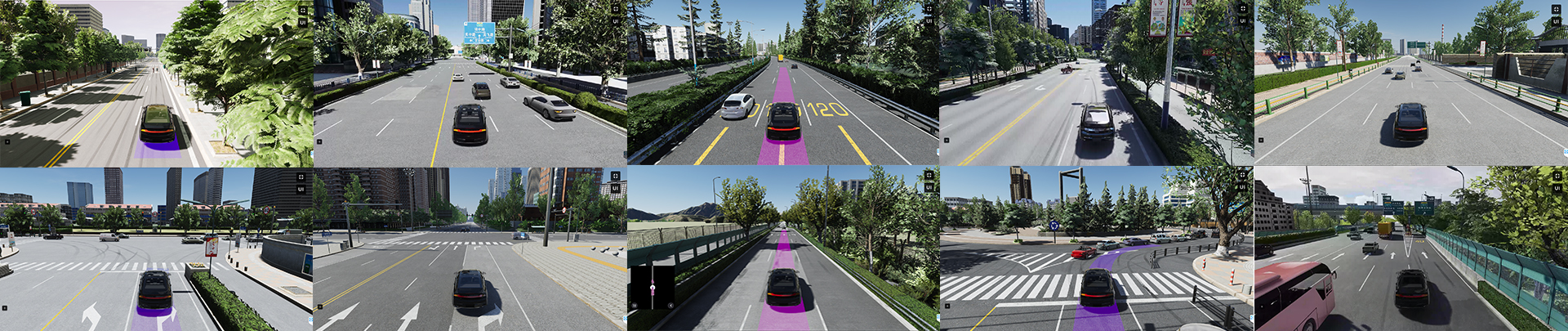
在数据获取方面,以视觉算法为基础,通过交通监控视频和无人机视频的信息提取技术所获取的车辆和行人真实轨迹数据则可以很好解决数据不足的问题,并对传统车载采集场景形成有效补充,使数据库更加丰富。
根据道路的不同结构,我们已提取出多种道路类型(包括匝道、直道、弯道、十字路口等)下交通参与者形成的轨迹库 Mirror-Traffic。后续我们会逐步推出更多轨迹数据集,并逐步涵盖所有典型的中国道路类型,提供更丰富的数据集。
运用领先的图像处理与深度学习等方法对图像中的车辆进行识别与跟踪,并对提取后的轨迹通过自动与人工相结合的方式进行过滤。最终车辆轨迹精度可以达到厘米级。

| 视频时长 | 600.00(min) |
| 累计行驶里程 | 20109.8(km) |
| 累计行驶时长 | 21.58(h) |
| 总轨迹数量 | 15200 |
| 合流数量 | 1200 |
| 视频时长 | 600.00(min) |
| 累计行驶里程 | 16082.1(km) |
| 累计行驶时长 | 21.13(h) |
| 总轨迹数量 | 10556 |
| 分流数量 | 290 |
| 视频时长 | 463.7(min) |
| 累计行驶里程 | 12602.5(km) |
| 累计行驶时长 | 19.89(h) |
| 总轨迹数量 | 10511 |
| 合流数量 | 175 |
本数据集仅供科研使用,未经允许不得把本数据集或基于本数据集衍生出的产品提供给第三方或者用于商业用途。本数据集基于CC BY-NC-ND 4.0许可协议发布。 如需商用以及更多类型的数据集,可以通过以下邮箱联系我们。scenarios@tsari.tsinghua.edu.cn














